

...ano, aj toto ide dohromady.
Pred casom (asi 2 roky spat) som si kupil nostalgicky Jawu 21 (klasicky "sportovy" Pionier), ktory je urceny na vselijake moje bastle - teda nieje urceny ako veteran, ale chcem sa s tym pohrat tak, aby bol spolahlivy a plne pripraveny na prevadzku pre tretie tisicrocie.
Ako prve som sa chcel zbavit nespolahliveho ramienkoveho zapalovania a nahradit to elektronikou.
Zapalovanie Vape mi prislo moc drahe a navyse by to nebola taka sranda, to tam supnut len tak nahotovo.
Tak som sa rozhodol spravit vlastny system zapalovania, ktory som az toto leto dotiahol do plne funkcneho a spolahliveho stavu. Preto sa podelim s mojim riesenim.
Zaklad je (ako inak?) Arduino Nano, ktory prepocitava oneskorenie zapalu benzinu podla otacok. Kedze ma udaj o aktualnych otackach, tak nema problem dynamicky menit aj predstih.
Mal som problem s rusenim z Inducky, ktory Arduinu vyrabal falosne prerusenia, co mi robilo najvacsie problemy. Nakoniec som to vyriesil softwarovo, zablokovanim prerusenia po urcitu dobu po zapaleni.
S originalnym ramienkom som mal tiez problem s rusenim cyklopocitaca, ktory teraz funguje korektne.
Najdolezitejsi je senzor, ktory som mal povodne magneticky (Hallova sonda), fungovalo to spolahlivo, ale nakoniec som to nahradil (pokusne, som si myslel ze to rusenie sposobuju magnety) optickou vidlickou (ale problem to neodstranilo a spat sa mi to uz nechcelo prerabat).
Senzor je nastaveny na LDC (Lower Dead Center), cize nabezna hrana je v DOLNEJ uvrati. Od tohto momentu sa aktivuje oneskorenie, ktore je vypocitane podla RPM a potom sa aktivuje vystup, ktory nabeznou hranou aktivuje iskru.
Indukcna cievka je elektronicka z Favorita/Felicie.
Samozrejme, toto je stavane na 12VDC. Preto tam mam DC-DC buck-boost menic, ktory tych potrebnych 12V vyraba - usmernenim napatia z magneta + orezanim pripadneho prepatia a filtraciou.
Menic sam o sebe je celkom rychly, ale Arduino nenastartuje za kratky cas nakopavania. Preto som pouzil aj podporny 18650 clanok, ktory zabezpeci napajanie pred samotnym startom motora.
Ako bonus, kedze Arduino pozna aktualne RPM a ma kopu vystupov nevyuzitych, tak som tam pridal LED bargraf ako otackomer.
Elektronika sa musela niekam vojst, tak som prerobil drziak filtra, ktory je zmenseny a 3D vytlaceny, pricom som vyuzil iba vlozku bez povodnej krabice.
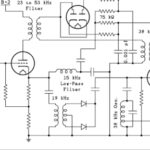
Ak by si to niekto chcel postavit, tu je schema a dps. Software mozem dodat podla zaujmu.
Realne fotky mozem pridat neskor.
Drziak senzora a disk su 3D vytlacene, najtazsie aktualne je vyrobit nahradu za vacku - ten 6-hran na obrazku. Nastastie, v praci mame ucnov na frezy a sustruhy, takze sa mozu ucit.
Menic DC-DC: https://www.aliexpress.com/item/3280034 ... TKhnWzb5lX
Indukcna cievka: https://www.autorelax.sk/cievka-indukcn ... ia-1-3-1-6
Existujuce napajanie 12VDC planujem vyuzit na zadne LED svetlo, ktore obohatim o brzdove a pre smerovky (mam ho uz pripravene).
Preto Arduino generuje aj 1Hz signal pre pouzitie smeroviek.

 1
1
