SVETELEKTRO

 Verzia pre tlač
Verzia pre tlač
Čítač s GPS normálem – 3. Měření, stabilita a další vývoj
V tomto článku se budu snažit popsat další průběh stavby našeho čítače a pomocí řady měření ověřím, zda naše řešení kmitočtového standardu GPSDO dostačuje svými parametry pro naše aplikace.
Postupné oživování a testy
Při postupném oživování a testech jednotlivých částí, jsme narazili na problém se stabilitou ladícího napětí OCXO. Fázový závěs funguje správně, po uzamčení PLL napětí osciluje kolem střední hodnoty. To je sice podstata funkce takovéto stabilizace, ale my se snažíme co nejvíce tuto chybu omezit a docílit co nejmenší změny napětí. Výstup XOR hradla IC3B totiž dává jen dvě velikosti napětí 0V nebo 5V. Kondenzátor v integračním článku C24 se tedy buď nabíjí nebo vybíjí. Není tam nikdy stav, kdy by se napětí neměnilo.
Úpravy integračního článku
Časová konstanta integračního článku R18+C24 musí být zvolena vhodně dlouhá. Laboroval jsem s hodnotami mezi 50ms a 40s. Nakonec se jako nejlepší jevily nejdelší časy.
Tedy hodnoty odpovídající R18=100k, C24=100μF.
Kmitočtovou stabilitu jsem poté odečítal z napěťové změny na výstupu operačního zesilovače U3.
Napěťová chyba v mV zhruba odpovídá kmitočtové chybě v mHz.
Δf ≈ ΔU [mHz,mV]
Po zahřátí a stabilizaci parametrů, napětí osciluje kolem střední hodnoty s chybou až ±3mV. Každý OCXO má trochu jiné napětí, při kterém se “uzamkne PLL”. V mém případě se je jedná o dva exempláře OCXO Trimble 34310-T a Trimble 34310-T2, to je 4,45V a 7,75V. To si vysvětluji jak jinou verzí, tak odlišným stárnutím každého oscilátoru. V konstrukci je na tento problém pamatováno. Stačí změnou hodnot rezistorů R5+R11 přenastavit hodnotu zesílení operačního zesilovače U3.
Taktovací “clock” signál z GPS přijímače má skutečně velmi přesný kmitočet. Jeho stabilita je až 3×10-13 Hz (přesnost Cesiových hodin). Problém je však v tom, že je tento signál zatížen fázovým šumem. To znamená, že se fáze hodinového signálu “náhodně” posouvá, ne o mnoho, přesto ano. Osciluje kolem “nulového bodu – uzlu” v intervalu asi 22ns. Tato chyba se v telekomunikacích nazývá “Jitter“. Při délce periody hodinového signálu 1MHz (T=1μs) je to vlastně 2,2% chyba. Fáze tedy “šumí” kolem “nuly”. Naproti tomu krystalový oscilátor, který je v OCXO, má velmi malý fázový šum. Jeho kmitočet však nebude tak přesný jako je signál z GPS.
Fázový šum je nežádoucí vlastnost všech harmonických oscilátorů, která je způsobena hlavně krátkodobou frekvenční nestabilitou. Každý oscilátor je frekvenčně nestabilní, tato nestabilita se pak určuje v příslušném časovém intervalu. Dlouhodobá nestabilita se určuje v rámci hodin, dní nebo let. Krátkodobá nestabilita je definována na intervalu od zlomků sekund až po minuty. Příčinou krátkodobé nestability jsou různé druhy šumů a jejich vzájemné kombinace. Jedná se například o termální šum, výstřelový šum, blikavý šum, apod. Na oscilační frekvenci se tato nestabilita projevuje jako náhodná fázová modulace s malým zdvihem. Frekvence, na které se fázový šum měří, je označována jako offsetová frekvence. Obálka fázového šumu je osově symetrická s osou na nosné frekvenci.
V tomto zapojení tedy kombinujeme vynikající dlouhodobou stabilitu GPS signálu s vynikající krátkodobou stabilitou OCXO oscilátoru.
Jako modifikaci jsem snížil pracovní kmitočet PLL smyčky z 1MHz na 100kHz. Při kmitočtu 1MHz docházelo k zákmitům ve stabilizaci a řídící napětí VCO mělo chybu i ±25mV. Při delších pulzech se také kondenzátor C24 stíhá nabíjet na vyšší napětí a můžeme použit ještě delší časy RC článku.
Pokud byl použit kmitočet menší, tedy 100kHz – relativní fázová chyba klesla na 0,22%, také rozptyl ladícího napětí.
Možná další vylepšení
Velikost fázového šumu nám tedy degraduje stabilitu našeho GPSDO, proto jej chceme dále redukovat použitím vhodného GPS přijímače. V současné době používáme GPS přijímač NEO-7M, který je relativně levný, má však vyšší fázovou chybu.
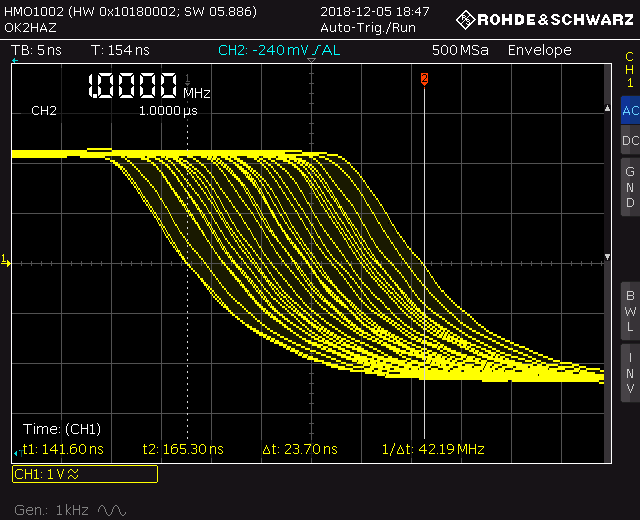
Na následujících obrázcích můžeme vidět velikost fázové chyby. K synchronizaci / triggeringu byl použit signál z OCXO (modrý), žlutě je znázorněn clock signál z GPS.
Na těchto obrázcích vidíme velikost fázové chyby asi 22ns.

Velikosti a největší zdroje fázových / časových chyb:

Existují tzv. “časovací” modely GPS přijímačů s označením “T”, které mají fázový šum menší. Jinou možností je přepnout GPS přijímač do “survey in”, kdy je pozice známá a chceme pouze časovou synchronizaci. V tomto režimu stačí pro příjem pouze jedna družice.
LEA-NEO-6T_ProductSummary_(UBX-13003351)
Dalším nápadem, jak získat stabilnější referenční kmitočet, je generování ladícího napětí OCXO přímo DAC procesoru AtXmega128. Ten disponuje 12bit DAC. Když napětí vhodně zesílíme, dostaneme ladící krok cca 0,61mV.
Idea je tato: Pomocí INT vstupu GPS přijímače (vstupu přerušení) dostaneme přesnou časovou značku události. Toto budeme spouštět, dejme tomu každou celou sekundu. Z rozdílu mezi značkami dopočítáme chybu. Delšími měřeními můžeme chybu kvantifikovat a měnit podle ní ladící napětí OCXO.
Měření stability s Rb oscilátorem
Při měření kmitočtové stability je třeba mít vhodný kmitočtový normál pro srovnání, minimálně o jeden řád přesnější než je měřený signál.
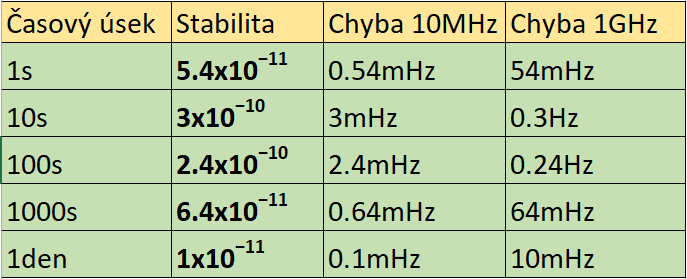
Pro názornost srovnání jednotlivých standardů v tabulce:

Potřebná míra stability je vždy svázaná s danou aplikací. Pro práci na krátkých vlnách nám stačí obyčejný krystalový oscilátor (XO). Na VKV pak teplotně kompenzovaný (TCXO). Na mikrovlnách bude třeba OCXO nebo GPSDO, pro správnou funkci sítě GSM + 4G potřebujeme Rubidiový standard. Abychom mohli odečítat přesnost polohy z GPS na 2m, potřebujeme Cesiové hodiny.
Míra stability / koncentrace se velmi často uvádí pomocí podílu např. milionu. 1PPM je tedy odchylka 1/1 000 000, 1PPB pak 1/1 000 000 000 atd. viz tabulka.

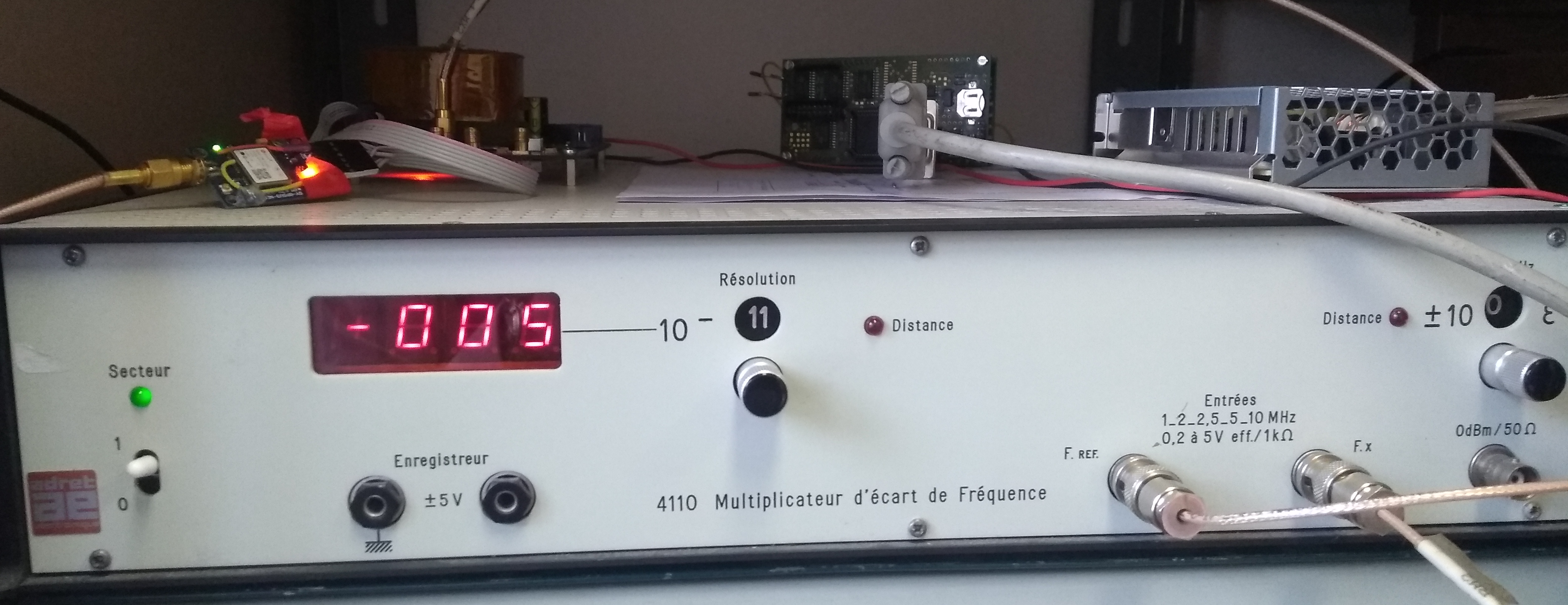
Jako etalon kmitočtu jsem použil Rubidiový kmitočtový normál “Efratom FRK-LLN-1A1B1A”. Pomocí měřiče odchylky Adret 4110 (díky Michalovi OK3ZM), jsem mohl měřit odchylku těchto dvou kmitočtů. Měřič odchylky má dva vstupy. Na jeden se přivede normálový signál (Rb) a na druhý měřený signál v našem případě GPSDO.
Rubidiový standard má stabilitu σ pro čas 1dne cca 1×10-12 Hz.

Rb oscillator

Blokové schéma měření
Samotné měření bylo automatizováno. Naměřené odnoty z odchylkoměru Adret 4110 se vyčítaly pomocí sériové linky do počítače, kde se každou sekundu ukládaly v TXT souboru (opět díky OK3ZM). Na takto získaných datech pak byla provedena matematická analýza. Zde jsem použil program Stable32. Autorem tohoto SW je pan William Riley, který jej poskytl bezplatně komunitě zabývajicí se časovými odchylkami. Program je přímo určen pro analýzu frekvenční stability oscilátorů a výpočet jejich chyb (Allanova variance, kmitočtový drift, stabilita, šum apod.)
Dosažené výsledky měření
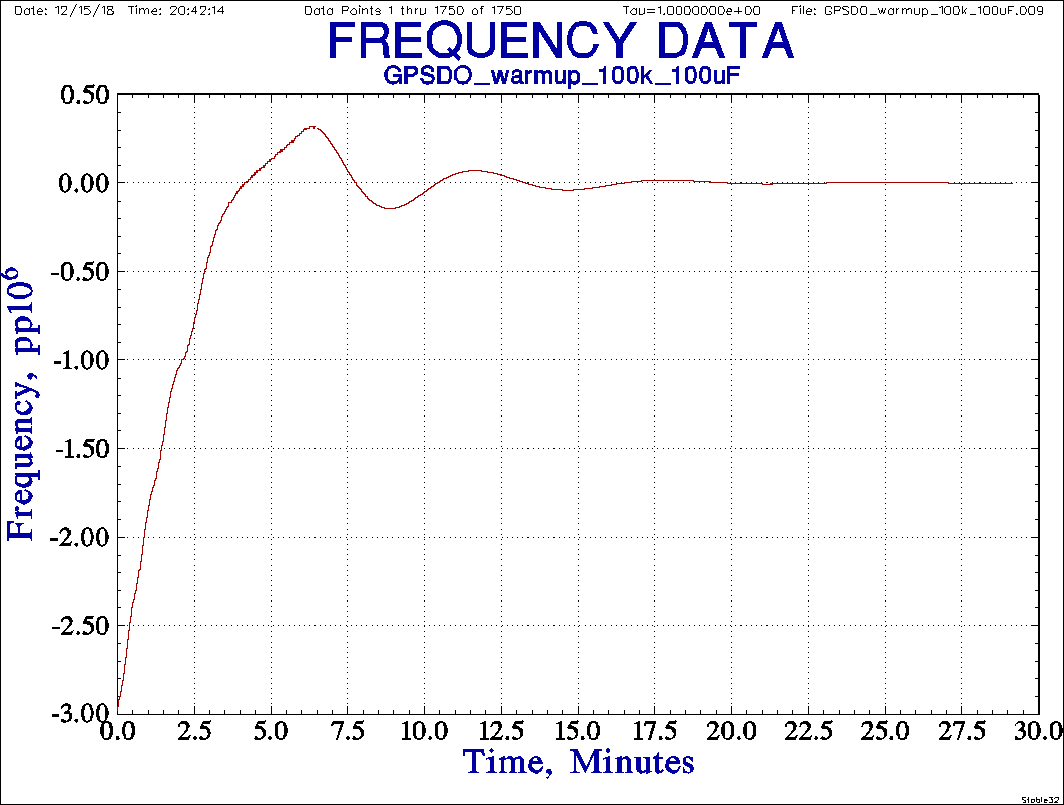
Prvotní nahřívání OCXO trvá přibližně 20min, průběh je vidět na tomto grafu:
Na následujícím obrázku vidíme obálku spektra fázového šumu, zatím změřeno pouze spektrálním analyzátorem. Tato metoda má řadu omezení, nevýznamější je skutečnost, že měříme složenou funkci fázového a amplitudového šumu. Dále jsme limitováni vlastním šumem LO lokálního oscilátoru spektrálního analyzátoru.

Změřené odchylky od kmitočtového normálu 10MHz jsou vidět na následujícím grafu:

Pro analýzu stability byla použita překrývající se Allanova variance – to je
univerzální a široce využívaná metoda. Používá se pro zvýšení přesnosti normální Allanovy variance. Je založena na výpočtech, které využívají některé stejné (překrývající se) vzorky, přičemž je možno využít jakkoli velký soubor překrývajících se dat. Zvyšuje se tak přesnost výpočtu stability, ale zvýšená přesnost vyžaduje větší výpočetní výkon a větší dobu zpracování.
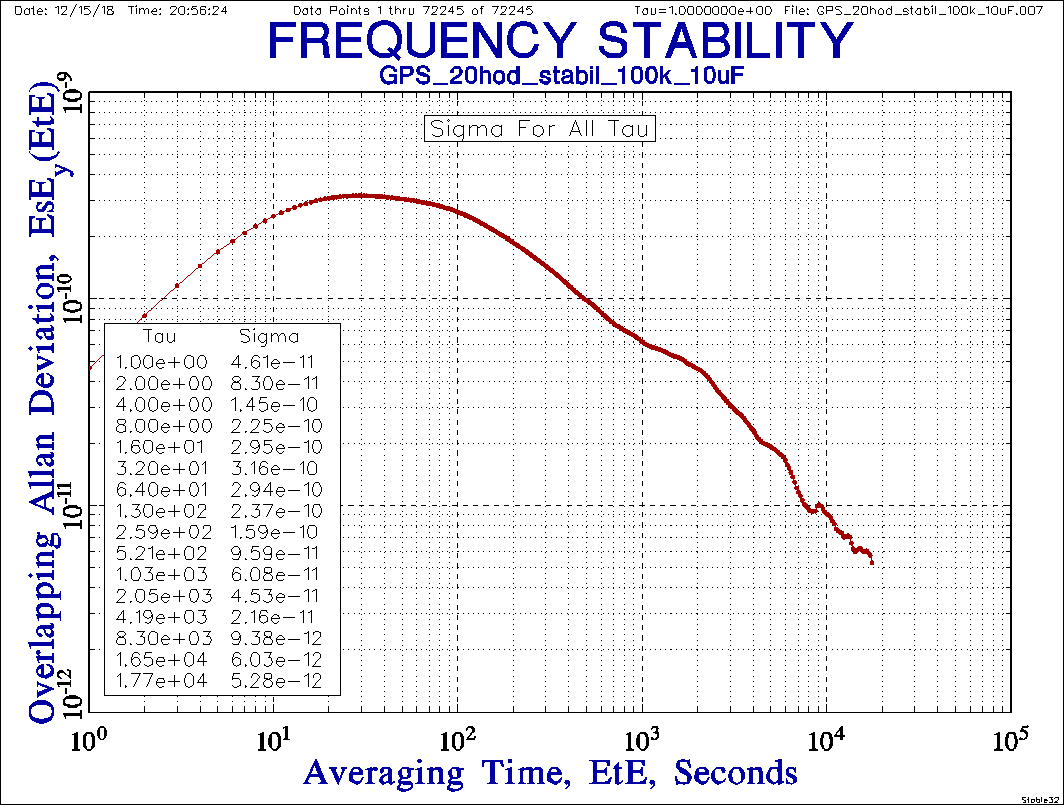
Na následujícím obrázku vidíme hodnoty stability GPSDO pro jednotlivé časy Tau, PLL smyčka běžela na 100kHz.
Samotný krystalový oscilátor OCXO vykazuje po nahřátí takovouto stabilitu:
Ladící napětí bylo nastaveno fixně pomocí víceotáčkového trimru.
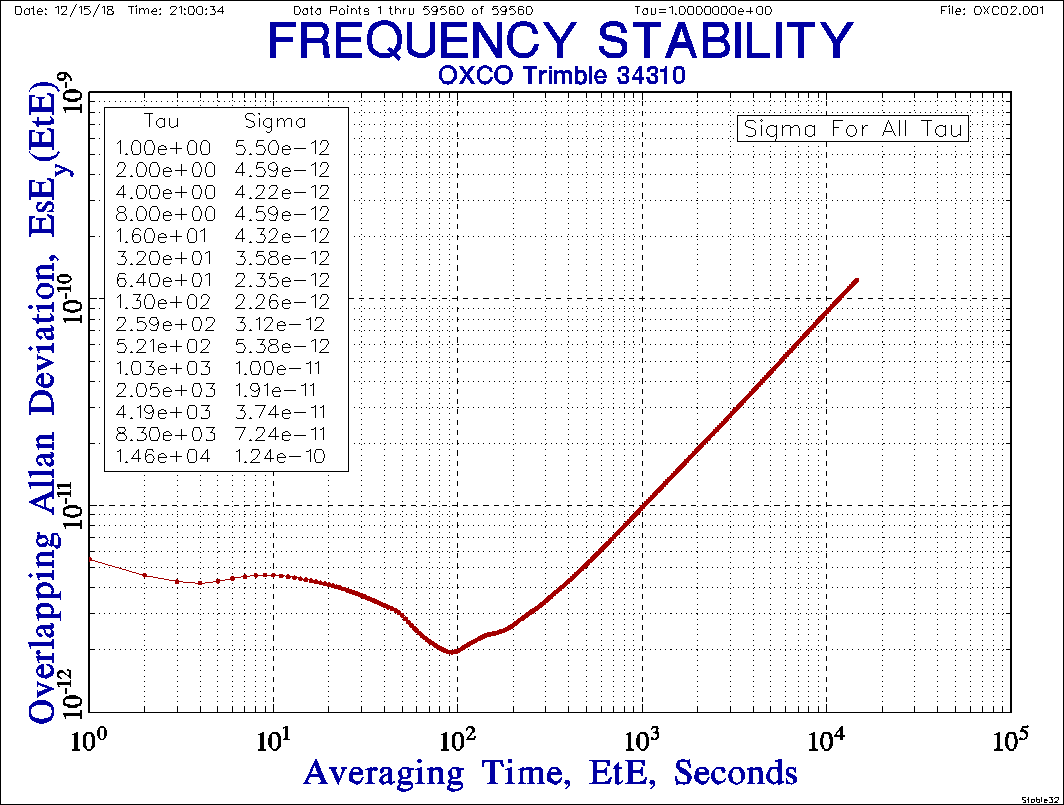
Na grafech vidíme, že GPSDO má na časech <100s stabilitu ≈ 3×10-10 , zde se projevuje náš problém se stabilitou ladícího napětí (chyba ≈3mV). To však pro měřící rozlišení našeho čítače FC-1300 s rezervou postačuje. Krystalový oscilátor má naopak v časech 1∼100s stabilitu ≈3×10-12 Hz. Na delších časech se již nepříznivě projevuje kmitočtový drift (který je v GPSDO kompenzován).
Jak jsem již uvedl, stabilita našeho GPSDO normálu plně postačuje pro zamýšlené využití v našem čítači. Pokud bychom však potřebovali kmitočtový normál přesnější, konstrukci bych modifikoval a ladící napětí VCO generoval pomocí cca 16bit DAC převodníku.
Co nemohu opomenout zmínit je, že při měření jsme se již dotýkali hranic přesnosti Rb oscilátoru coby etalonu kmitočtu. Na měřeních byla poznat i nepatrná změna teploty v místnosti.
Tabulka s hodnotami σ pro příslušné časy Tau:
- DATV + NB provoz přes družici EsHail-2 - 29. apríla 2020
- Up-konvertor pro EsHail-2 – Aktualizace - 10. augusta 2019
- Up-konvertor pro EsHail-2 - 11. apríla 2019
Komentáre (1)
Pridaj komentár
Prepáčte, ale pred zanechaním komentára sa musíte prihlásiť.
Ahoj, Asi sa uz dalej na vyvoji nepokracuje, alebo ano ? 🙂 Vyzera to zaujimavo, ale sledujem, ze dlhsie sa okolo toho nic nepohlo.