V tejto časti sú spomenuté všetky elektronické komponenty.
Hardvérová časť
Je možné ju rozdeliť na tri kategórie. Prvá z nich obsahuje súčiastky osadené na doske plošných spojov, tá druhá obsahuje súčiastky, ktoré sú rozmiestnené na rôznych častiach vozidla. Poslednú tretiu tvorí pohonné ústrojenstvo zložené z riadiacej časti, motorov a akumulátorov. Pri výbere vhodných komponentov sa brala do úvahy dostupnosť, parametre a v neposlednom rade cena. Väčšina z nich teda pochádza z čínskych internetových obchodov. Kvalita niektorých objednaných produktov bola občas nevyhovujúca a preto bolo potrebné počas návrhu prototypu súčiastky obmieňať. Keďže čas dopravy vo väčšine prípadoch trval aj viac ako mesiac, bolo výsledné vytvorenie vozidla časovo náročné.
Diagram zapojenia
Celkové zapojenie je možné v jednoduchosti zakresliť do nižšie zobrazeného diagramu. Časť s názvom „Ovládanie“ zahŕňa v sebe všetko, čo sa nachádza na pohyblivom ramene, ktoré slúži pre ovládanie vozidla. Blok „Riadenie“ obsahuje súčiastky, ktoré sa nachádzajú na doske plošných spojov, prípadne sú na nej konektory pre ich pripojenie. Táto časť sa podieľa na získavaní dát zo snímačov, ich spracovaním, výpočte potrebných akčných zásahov, následným vyobrazením a odoslaním parametrov po zbernici. Časť Pohonného ústrojenstva následne zahŕňa prvky, ktoré na základe získaných dát rozhýbu vozidlo daným smerom.
 [1]
[1]
Diagram zapojenia
Doska plošných spojov
Obsahuje viaceré súčiastky, ktoré sú rozmiestnené na jednostrannej doske. Bola navrhnutá v programe EAGLE a následne profesionálne vyrobená. Obsahuje nižšie popísané súčiastky a výslednú realizáciu je možné vidieť na obrázkoch na konci článku. Najskôr bola vytvorená prvá verzia, ktorá obsahovala menšie nedostatky, ktoré sa týkali hlavne neprehľadnosti pripojenej kabeláže. Nová verzia má vyvedené dupont konektory na jednej strane DPS. Taktiež je pridaný bluetooth modul, pre možnú budúcu komunikáciu.
Napájanie vozidla
Keďže hodnota napájacieho napätia vozidla je 24V a hodnota prúdu v špičkách môže byť až 30A, bolo potrebné toto vozidlo nejakým vhodným spôsobom pripájať ku zdroju napätia – akumulátorom. Samozrejme existujú spínače, ktoré dokážu zniesť požadované parametre, avšak z estetického hľadiska by neboli vhodné. Pristúpilo sa teda k elegantnejšiemu riešeniu, ktoré obsahuje nižšie spomenuté komponenty. Hlavnou prioritou bola nulová spotreba hlavných akumulátorov. Po rôznych komplikovaných spôsoboch zapojení a neúspešných pokusoch, kedy nakoniec došlo až k zhoreniu hlavného mikroprocesora sa pristúpilo na nasledovné riešenie.
 [2]
[2]
Zapojenie napájania
ATtiny13
Úlohou tohto mikrokontroléra je čisto zapínanie a vypínanie vozidla. Jeho použitie je potrebné z viacerých dôvodov. Prvý je ten, že na pohyblivom ramene sa nachádza tlačidlový spínač, ktorého funkcia je len formou dočasného zopnutia kontaktu pri jeho stlačení a následného prerušenia kontaktu pri jeho pustení. Druhý dôvod je nezávisle od hlavného riadiaceho mikrokontroléra vypnutie vozidla v prípade akéhokoľvek problému a taktiež nemožnosť vypnutia vozidla náhodným stlačením tlačidla. Preto tento mikrokontrolér počíta čas kedy je kontakt zopnutý a až následne vykoná jeho funkciu. Poslednou treťou funkciou je oboznámenie používateľa vhodnými zvukovými tónmi. Keďže veľa funkcií sa od tohto mikrokontroléra nevyžadovalo, postačila najnižšia verzia od Atmelu.
 [3]
[3]
ATtiny13
LIR2032
Aby spotreba hlavných akumulátorov bola nulová, jeho napájanie je riešené pomocou Li-Ion akumulátora. LIR2032 je náhrada za CR2032. Jeho rozmery sú totožné avšak jeho výhodou je vyššie napätie až 4,2V, keďže pri pôvodnom návrhu nižšie spomenuté bistabilné relé nedokázalo zopnúť kontakt pri napätí 3V. Mikrokontrolér je po celý čas napájaný, avšak počas nečinnosti je v móde Power-down, kedy je odber prúdu menej ako 0,1μA. Zobúdza sa len pri stlačení tlačidla na čas potrebný pre vykonanie úloh. Môže sa zdať, že vymieňanie akumulátora bude veľmi časté avšak opak je pravdou a vďaka úspornému módu zvládne tisíce zapnutí a vypnutí. Taktiež je tento akumulátor nabíjací, tým pádom ak aj dôjde časom k jeho vybitiu, stačí ho jednoducho nabiť, nie je potreba kúpa nového.
 [4]
[4]
LIR2032
RELAUTO12V-60A
Na spínanie veľkých prúdov sa použilo relé používané v autách so spaľovacím motorom, kde bežne spína napájanie elektroniky auta z autobatérie. Kontaktmi relé dokáže prechádzať prúd až 60 ampérov, preto je pre túto aplikáciu vhodné. Na zopnutie relé je potrebné napätie 12 voltov, ktoré je vyvedené z jedného z dvoch hlavných akumulátorov. Takéto veľké napätie nedokáže mikrokontrolér spínať a preto pre jeho zopnutie bolo použité bistabilné relé.
 [5]
[5]
RELAUTO12V-60A
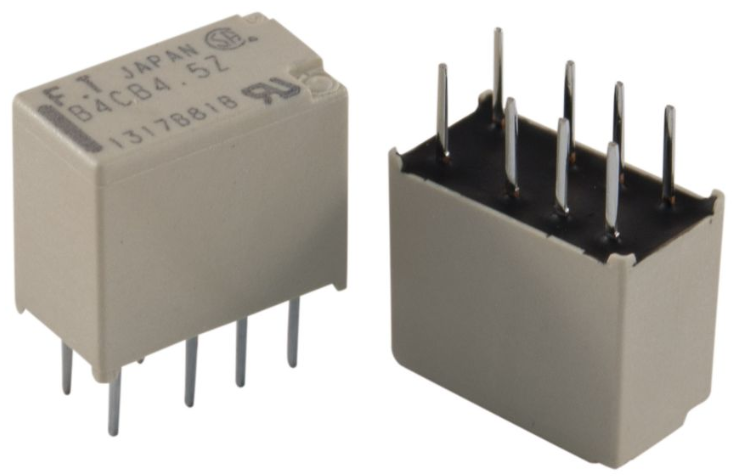
FTR-B4 CB 4.5Z
Bistabilné relé má tú výhodu, že kontakt dokáže byť zopnutý aj bez napájania jeho elektromagnetu. Tým pádom je napätie potrebné len počas zopnutia alebo rozopnutia kontaktu. Ako je možné vyvodiť z jeho názvu má dva stavy. Medzi nimi je možné prepínať pomocou zmeny polarity na jeho dvoch vstupných pinoch. Tento typ relé bol zvolený hlavne z dôvodu bezpečnosti, kedy by mohlo počas prerušenia napájania cievky relé odpadnúť a spôsobiť vypnutie vozidla počas chodu.
 [6]
[6]
FTR-B4 CB 4.5Z
Piezo bzučiak
Ako notifikácia používateľa pri spustení slúži tento piezo bzučiak. Jednoduchým pripojením k jednému z výstupov mikrokontroléra a následne pomocou pulzno-šírkovej modulácie PWM je možné vytvárať tóny. Boli použité dve kombinácie trojice tónov. Pri zapnutí je postupnosť vzostupná, naopak pri vypnutí je postupnosť tónov zostupná. Prevádzkové napätie je v rozmedzí 3-5V a preto je vhodné aj pre napájanie z už spomenutej batérie.
 [7]
[7]
Piezo bzučiak
Proces zapínania a vypínania
Po stlačení tlačidla, sa mikroprocesor zobudí z módu Power-down. Využíva pri tom funkciu externého prerušenia mikrokontroléra. Následne čaká 2 sekundy aby sa tým zabránilo nechcenému zapnutiu alebo vypnutiu vozidla. Ak aj po tomto čase je kontakt tlačidla zopnutý, načíta sa z pamäte EEPROM uložený stav, v ktorom bol pred jeho posledným uspaním. Táto časť je potrebná z toho dôvodu, aby bolo možné určiť do akého stavu sa má bistabilné relé dostať a teda, či napájanie vozidla pripojiť alebo odpojiť. Taktiež sa tým určuje poradie tónov piezo bzučiaka. Následne sa pustí napätie určenej polarity do bistabilného relé, ktoré zopne alebo rozopne hlavné relé. Na koniec sa zapíše do pamäte EEPROM opačný stav ako bol na začiatku a mikrokontrolér sa uspí.
Riadenie vozidla
Riadiaca časť vozidla sa skladá z dvoch základných prvokov. Sú to mikrokontrolér ATmega644PA a akcelerometer s gyroskopom v jednom puzdre MPU6050. Spoločne sa starajú na vyvažovaní základne z nerezovej platne a pohybe vozidla vpred a vzad. Pre ovládanie vozidla do strán im pomáha akcelerometer ADXL335.
ATmega644PA
Tento mikrokontrolér zabezpečuje všetky výpočtové úkony a komunikáciu s perifériami. Keďže je potrebné zabezpečiť čo najväčšiu rýchlosť a odozvu bol k nemu pripojený kryštál pracujúci na frekvencii 16MHz. Kvôli dosiahnutiu čo najpresnejšej frekvencie, redukcie šumu a spoľahlivosti oscilácie, sú podľa odporúčania výrobcu pridané dva keramické kondenzátory s hodnotou 22pF. Mikrokontrolér bol vybraný na základe viacerých požadovaných vlastností ako sú dostatočne veľká FLASH pamäť, integrovaný AD prevodník, dve komunikačné zbernice USART, zbernicu I2C ako aj veľké množstvo vstupno/výstupných portov pre pripojenie periférii a celkové zapuzdrenie v puzdre DIP40, ktoré bolo zvolené z dôvodu prípadného vymenenia mikrokontroléra pri poruche.
 [8]
[8]
ATmega644PA
Meranie uhlu naklonenia základne
Aby vozidlo dokázalo stabilne udržiavať rovnováhu, potrebuje na to nevyhnutne dve súčiastky, akcelerometer a gyroskop. V spoločnej kooperácií je možné získať čo najpresnejší uhol naklonenia vozidla a následne získané údaje poslať na spracovanie do PID regulátora.
Akcelerometer
Používa sa na meranie zrýchlenia, náklonu, uhlu naklonenia, natočenia alebo merania otrasov. Jeho využitie je v letectve, herných konzolách alebo na monitorovanie ľudského pohybu.
Gyroskop
Je určený na meranie uhlovej rýchlosti. Podobne ako akcelerometer sa používa v letectve, priemysle, ale aj v spotrebnej elektronike ako sú napríklad smartfóny alebo tablety. Jeho jednotkou sú stupne za sekundu °/s, ktoré vyjadrujú ako rýchlo sa meraný objekt otáča. Rotáciu možno merať vzhľadom k jednej z troch osí.
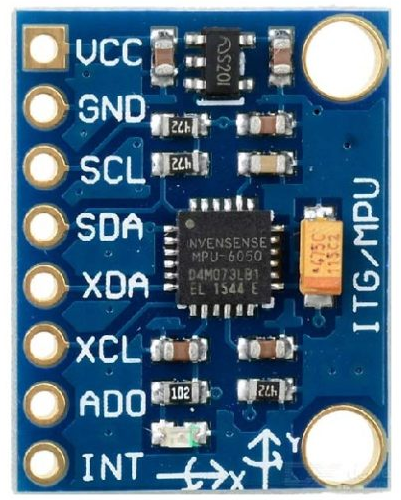
MPU6050
Pre udržanie rovnováhy je potrebné merať uhol a uhlové zrýchlenie základne. Snímače na to vhodné sú akcelerometer a gyroskop. Ich úlohu plní MPU6050, ktorý kombinuje oba typy snímačov v jednom puzdre. Pre komunikáciu využíva I2C zbernicu. Na tento projekt bol použitý tento snímač formou modulu, pretože samotná súčiastka je ťažko spájkovateľná na dosku plošných spojov. Táto DPS taktiež obsahuje potrebný stabilizátor a rezistory.
 [9]
[9]
MPU6050
Meranie uhlu naklonenia rukoväte ADXL335
Trojosí akcelerometer ADXL335 je pripevnený na rukoväť a má za úlohu snímať jej vychýlenie do strán. Keďže sa pohybuje len v jednej ose, je využitá len jedna jeho os. Na rozdiel od MPU6050 nevyužíva pre komunikáciu žiadnu zbernicu. Hodnota uhla vychýlenia je priamo úmerná napätiu, ktoré je neskôr spracované mikrokontrolérom.
 [10]
[10]
ADXL335
Meranie stavu akumulátorov
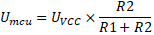
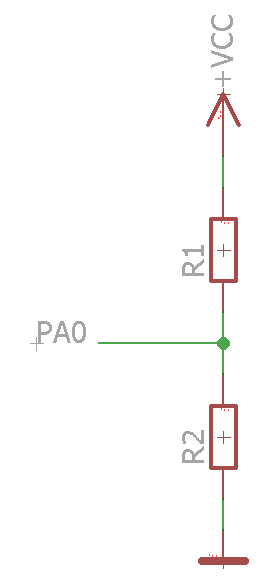
Nominálne napätie dvoch akumulátorov zapojených do série je 24V a pri plnom nabití dosahujú spoločne hodnotu 27,6V. Toto napätie je vyššie než to, ktoré dokáže AD prevodník mikrokontroléra odmerať. Preto bolo potrebné toto napätie znížiť tak, aby bolo na vstupe prevodníku maximálne 5V. Bol na to použitý jednoduchý napäťový delič, ktorý využíva zapojenie dvoch rezistorov do série. Týmto spôsobom je možné merať stav nabitia vozidla. Pomocou postupného dosadzovania do vzorca boli zistená najvhodnejšia kombinácia odporov s hodnotami 1MΩ a 220KΩ.
 [11]
[11]
 [12]
[12]
Meranie okolitej teploty DS18B20
Prakticky všetky komerčne dostupné vozidlá majú funkciu merania okolitej teploty. Z dôvodu, že sa na tomto vozidle jazdí bez akejkoľvek vonkajšej ochrany voči poveternostným podmienkam, bolo vhodné ho vybaviť základným meraním teploty. Pre túto aplikáciu bol použitý snímač DS18B20 pomocou trojvodičového zapojenia. Pre správnu funkciu bol k nemu pripojený rezistor s hodnotou 4,7KΩ.
 [13]
[13]
DS18B20
Komunikácia s okolím HC-07
Ďalšou úlohou tohto vozidla je komunikácia s okolím cez bezdrôtové rozhranie bluetooth. Pomocou neho je možné meniť rôzne nastavenia a zapínať jednotlivé funkcie. Tento bluetooth modul obsahuje všetko potrebné pre jednoduché pripojenie k mikrokontroléru na jednej doske plošných spojov. Vyznačuje sa malými rozmermi, zbernicou USART a vhodným stabilizátorom napätia umožňujúcemu pracovať s napätím 5V.
 [14]
[14]
Bluetooth modul HC-07
Súčiastky rozmiestnené po vozidle
Okrem súčiastok umiestnených na základnej doske, obsahuje vozidlo aj ďalšie snímače, bez ktorých by sa pre jeho správne fungovanie nezaobišlo.
Meranie rýchlosti a najazdenej vzdialenosti vozidla
Pomocou senzoru TLE4905L, prilepeného na kúsku plexiskla a upevneného blízko kolesa, je možné zisťovať prítomnosť magnetu upevneného na kolese. Tento senzor využíva Hallov jav a pri priblížení magnetu odošle snímač hodnotu log.1. Na túto úlohu je využitý ICP pin mikrokontroléra, s využitím prerušení. Pre väčšiu presnosť sú na kolese dva magnety. Mikrokontrolér následne meria čas, za ktorý spraví koleso jednu pol otáčku. Z nameraného času a známeho obvodu kolesa, ktorého hodnota je predelená dvomi, je možné dopočítať výslednú rýchlosť.
 [15]
[15]
TLE4905L
Vyobrazenie aktuálnych údajov
Na zobrazenie informácií počas jazdy bol použitý jednoduchý LCD displej s populárnym radičom HD44780. Jeho podsvietenie je regulované pomocou NPN tranzistora BC639. Pri štarte je následne možno vidieť aj efekt postupného rozsvecovania, spoločne s uvítacou frázou.
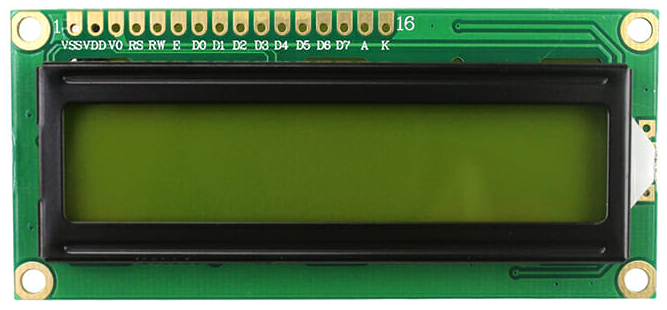 [16]
[16]
LCD displej
Ovládanie vozidla
Boli použité dve tlačidlá, ktoré obsahujú jednoduché mikrospínače. Prvé slúži na zapnutie a vypnutie vozidla. Dvojsekundovým stlačením tlačidla sa zopne cez mikrokontrolér pomocné bistabilné relé, ktoré následne drží kontakt 12V relé. Druhé tlačidlo slúži na softvérové zapnutie a vypnutie motorov a regulátora.
 [17]
[17]
Tlačidlový spínač
Pohonné ústrojenstvo
Silová časť je oddelená od riadiacej a komunikujú navzájom pomocou USART zbernice. Má viaceré časti, ktoré sú nižšie popísané. Pri návrhu bolo potrebné brať do úvahy fakt, že vozidlo obsahuje dva motory, ktoré je potrebné riadiť nezávisle od seba.
Riadenie motorov
Pri riadení motora sa dá využiť viacero techník ako regulovať jeho otáčky. V tomto prípade bolo použité zapojenie štyroch tranzistorov do takzvaného H-mostu. Pomocou tohto zapojenia je taktiež možné meniť smer otáčania motora. Na obrázku nižšie je názorne v jednoduchosti vidieť princíp jeho fungovania. Obsahuje konektory pre napájanie +V, zem GND a dva vstupy pre jeho riadenie A a B. Tieto vstupy môžu nadobúdať dve logické úrovne log. 0 a log. 1. V prípade, že na jednom z týchto vstupov sa objaví log. 1 a na druhom z nich log. 0, motor sa roztočí určeným smerom. Pri opačnom zapojení vstupov sa motor začne otáčať opačným smerom. Pri rovnakých logických úrovniach, keď sú na vstupe dve logické nuly alebo jednotky je možné využiť funkciu brzdenia.
 [18]
[18]
H-most
Regulovanie otáčok je následne možne pomocou pulzno-šírkovej modulácie PWM, pri ktorej sa mení dĺžka impulzu a teda zopnutie alebo rozopnutie konkrétneho tranzistoru. Z počiatku bola idea vytvoriť vlastné výkonové riadiace ústrojenstvo, avšak po neúspešných pokusoch bolo potrebné siahnuť po jednom z komerčných riešení.
Sabertooth 2x25v2
Keďže komerčných riešení, ktoré by vyhovovali riadeniu tohto vozidla je veľmi málo, ostalo na výber už len jedno riešenie. Kvôli jeho vysokej cene bolo zo začiatku zamietnuté, avšak po dlhšom rozhodovaní ho nakoniec bolo nutné použiť.
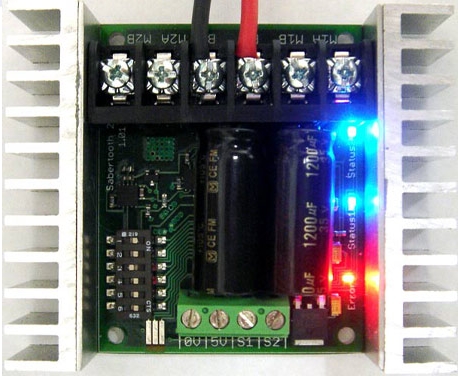 [19]
[19]
Sabertooth 2x25v2
Sabertooth 2x25V, má viacero druhov ochrán ako je ochrana proti skratu, nadprúdu alebo aj tepelnú ochranu, ktoré chránia zariadenie voči zničeniu. Preto pokiaľ nie je vstupné napájanie prepólované, je toto zariadenie prakticky nezničiteľné. Pri brzdení využíva rekuperáciu elektrickej energie, ktorú následne vracia späť do akumulátorov. Obsahuje mosfety, ktorých frekvencia je veľmi vysoká a preto nie je počuť žiadne pískanie pri rozbiehaní motorov, ako je to pri iných riešeniach pre motorové riadenie. Pred používaním je potrebné pomocou prepínačov nastaviť potrebné parametre. Vstupný signál možno priviesť viacerými spôsobmi:
- Na dva nezávislé analógové vstupy je možné priviesť napätie v rozsahu 0 – 5V pomocou potenciometra alebo PWM signálu z mikrokontroléra a následne tak riadiť smer a otáčanie motorov.
- Pomocou R/C módu je možné využiť prípad, kedy nastane strata signálu. Motory tak bezpečne zastavia.
- Využiť sa dá aj komunikácia pomocou linky RS232, napríklad pre prepojenie s počítačom.
- Posledný spôsobom je komunikácia pomocou USART s nastavením rýchlosti komunikácie.
Motory MS1012
Pohon kolies tvoria dva nezávislé motory, čím je docielené možné otáčanie vozidla do strán. Sú napájané napätím 24V a ich maximálny prúdový odber je 14A. Výsledný výkon jedného motoru dosahuje 320W. Kvôli vzhľadu bolo potrebné vymeniť na jednom z motorov smer vývodu napájacích vodičov.
 [20]
[20]
MS1012
Akumulátory CSB EVH12150
Pri výbere zo širokého množstva akumulátorov, ktoré sú potrebné pre napájanie motorov a elektroniky vozidla, hrala hlavnú úlohu cena. Preto boli využité olovené akumulátory, ktoré sa bežne vyskytujú v automobiloch pre štart benzínového motoru alebo v rôznych druhoch elektrických kolobežiek, elektroskútrov, golfových vozíkoch a podobne. Pre túto aplikáciu bol vybraný špeciálny druh trakčných AGM gélových akumulátorov, ktoré miesto kvapalného obsahujú zaschnutý elektrolyt. Pri tomto type je výhoda vyššej životnosti pri cyklickom hĺbkovom vybíjaní. Keďže jeden kus má nominálne napätie 12V, bolo použité sériové spojenie dvoch takýchto akumulátorov. Tieto akumulátory majú kapacitu 15Ah a pri plnom nabití dosahujú napätie 27,6V.
 [21]
[21]
Akumulátor CSB EVH12150
TecMate OptiMate 2
Nabíjanie je možné realizovať viacerými druhmi nabíjačiek. Platí pravidlo, že ak sa chce dosiahnuť čo najvyššiu životnosť akumulátorov, mali by sa nabíjať prúdom desaťkrát menším ako je menovitá kapacita akumulátora. Samozrejme jeho maximálny nabíjací prúd, je vždy uvedený v parametroch akumulátora a je niekoľko násobne vyšší. Z cenového aj praktického hľadiska nakoniec bola použitá nabíjačka TecMate OptiMate 2. Táto nabíjačka bezúdržbových akumulátorov má menovité napätie 12V a maximálny nabíjací prúd má hodnotu 0,8A. Preto podľa výpočtov je jasné, že nabíjanie jedného 15Ah akumulátora môže trvať 15 až 20 hodín. Aj keď je táto hodnota vysoká, v praxi sa nikdy nevybíja akumulátor do veľmi nízkych hodnôt napätia a preto reálny čas je nižší. Obsahuje aj viaceré funkcie ako sú ochrana voči prípadnému skratu, ochrana voči prepólovaniu a signalizáciu stavu akumulátora pomocou LED diód. Taktiež dokáže oživiť hlboko vybité akumulátory, otestovať ich stav a udržať ich trvalo v nabitom stave. Využíva pri tom variabilné nastavenie prúdu podľa aktuálnych okolnosti. Oproti bežným nabíjačkám sa vyznačuje hlavne stabilitou nabíjacieho napätia a zamedzuje prebíjaniu akumulátora a tým aj zvyšuje jeho životnosť.

TecMate OptiMate 2
V nasledujúcej časti bude popísaná softvérová časť.
Schéma zapojenia
 [22]
[22]
Návrh DPS
 [23]
[23]
Reálne vyhotovenie DPS
 [24]
[24]